|
||||||||||||
INTRODUCCIÓN
Las actividades en terminales marítimas con monoboyas son ampliamente utilizadas en operaciones costa afuera para carga y descarga de fluidos con buque tanques, su implementación está en función de varios factores que permitan realizar las operaciones con seguridad, y se realiza cuando la infraestructura instalada en costa es limitada o requiere de costos importantes para construir rompeolas y realizar dragados profundos que permitan dar acceso a los buques, uno de los factores relevantes en la decisión para implementar terminales fuera de costa es su justificación económica considerando los costos comparativos de construir infraestructura en la costa y los costos y requerimientos para operar de forma segura en costa afuera.
Para la operación de carga y descarga de fluidos que transportan los buques tanques costa afuera se utilizan los sistemas de amarre a un solo punto, que consiste en una boya a la que el buque se sujeta y se conecta con mangueras para realizar la transferencia, la boya es sujeta con anclajes en el fondo marino y se conecta a tuberías hasta las instalaciones en costa, las características de cada boya son particulares y especialmente diseñados para una operación segura.
La factibilidad de operación de terminales marítimas en alta mar está en función de las condiciones oceanográficas que permitan realizar las actividades en forma segura, estas condiciones se establecen asociado el tiempo que se presentan estas condiciones de forma anualizada en un determinado sitio. Su influencia en la embarcación radica en el hecho de que las condiciones oceanográficas y meteorológicas ejercen fuerzas en las embarcaciones que generan 6 movimientos principalmente, tres desplazamiento y tres giros asociados a cada eje. Con este trabajo se presenta una metodología para determinar los movimientos de una embarcación simulando la operación de un buque atado a una boya de transferencia considerando el oleaje y las corrientes marinas en un sitio determinado, con los resultados de los movimientos del buque se estableció un límite de altura de ola para determinar el porcentaje de inactividad. Las condiciones de oleaje empleadas fueron obtenidas de una estación de la Red Nacional de Estaciones Oceanográficas y Meteorológicas (RENEOM) del IMT.
METODOLOGÍA
La siguiente metodología propuesta es para determinar los movimientos de una embarcación que son el resultado de las fuerzas externas generadas principalmente por el viento que ejerce un empuje sobre la embarcación; por las corrientes marinas que generan un empuje en el caso del buque, y por los movimientos que induce la acción del oleaje, ya que de estos movimientos de la embarcación que se obtengan, dependerá la seguridad y optimización de las maniobras de las embarcaciones..
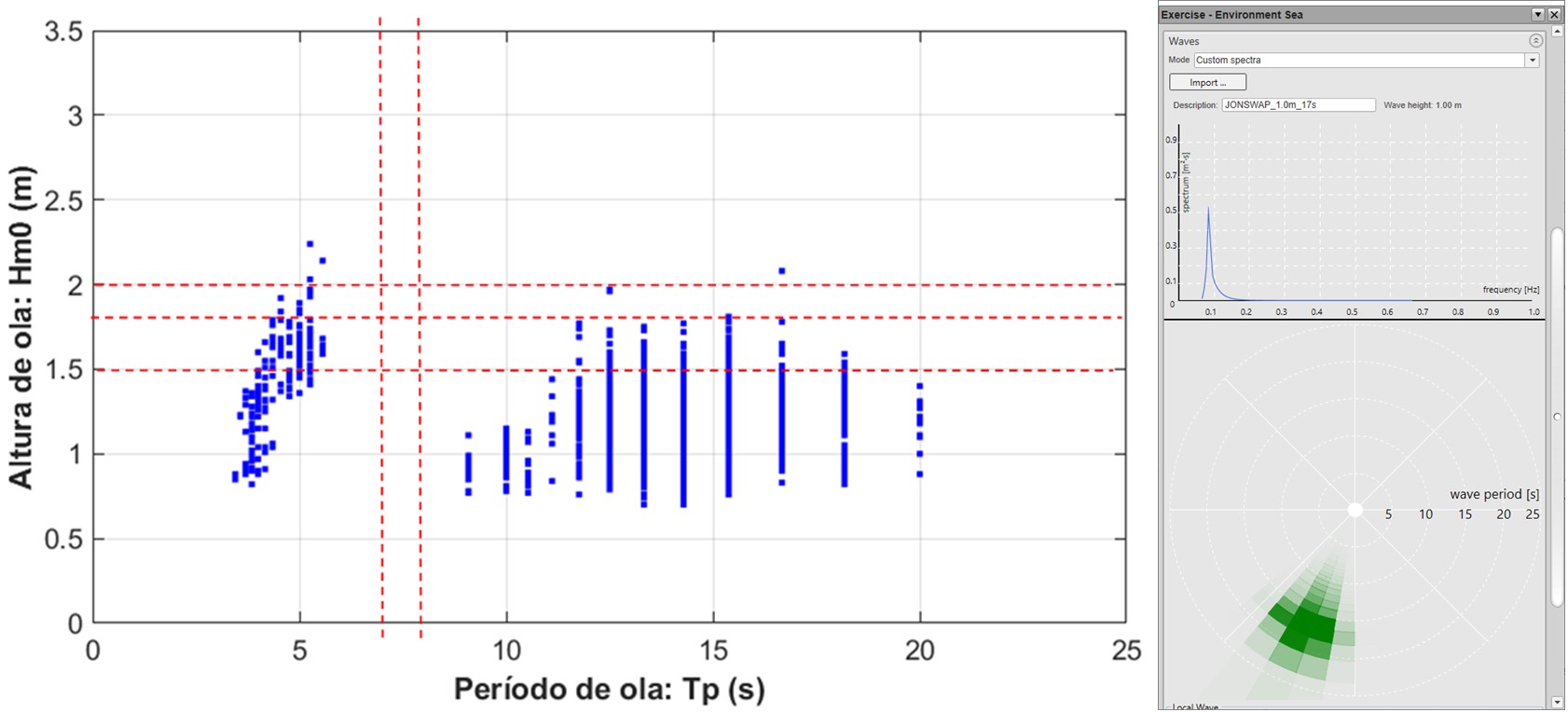
Se analizó la información de oleaje registrado con una boya oceanográfica de la RENEOM determinando sus características de forma mensual y anual empleando un análisis estadístico de las alturas de olas significantes y periodos de ola asociados en 16 direcciones, a fin de determinar las condiciones iniciales a simular.
Figura 1. Análisis de la altura y periodo de oleaje registrado de forma mensual
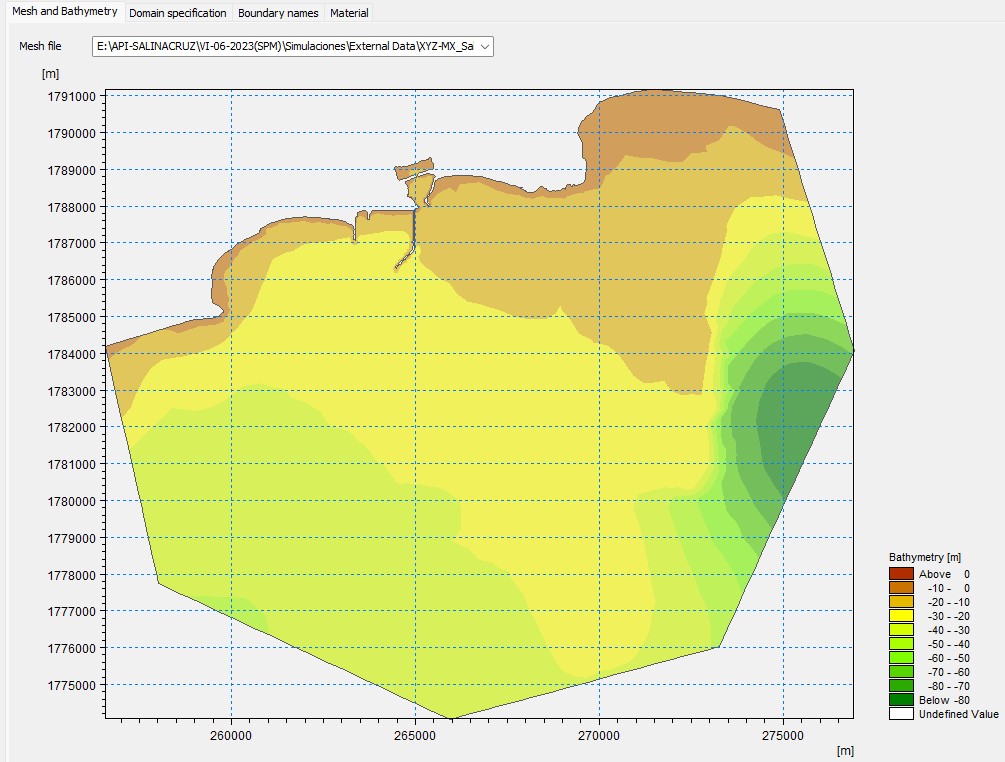
Posteriormente, se implementó un modelo numérico para la propagación de oleaje determinando también las corrientes marinas en una localización geográfica propuesta ubicada a una profundidad de 28.5 m.
Figura 2. Área del modelo de propagación de oleaje para determinar corrientes marinas.
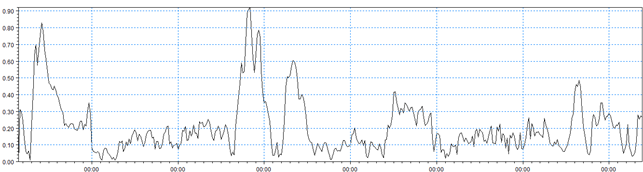
Figura 3. Corrientes marinas por la acción del oleaje.
Con la información anterior, en el simulador de maniobras de embarcaciones se desarrolló el escenario de un modelo de buque atado a una boya de transferencia y se modelaron las características del oleaje obtenidas anteriormente, mediante espectros frecuenciales actuando en las direcciones de incidencia, además de incorporar las corrientes marinas asociadas a cada uno de estos espectros característicos, las dimensiones del buque tanque simulado fueron de 228.6 m de eslora, 32.2 m de maga y un calado 16.5 m. Para el control de posición en el modelo de navegación, al buque tanque se le incorporó un remolcador atado en la popa como auxiliar para la maniobra. De la simulación de la maniobra, se registraron y se analizaron los movimientos de la embarcación para las diferentes alturas de ola, periodos de ola y condición de corriente marina.
MODELO DE SIMULACIÓN
El sistema del simulador de maniobras en tiempo real del IMT utiliza un el software denominado K-sim versión 2.7, el sistema ofrece la posibilidad de llevar a cabo simulaciones de forma virtual, con varios buques que interactúan en la misma maniobra, como es el caso de los buques remolcadores que ejercen alguna acción sobre otro buque. En este caso, las fuerzas de tensión generadas en las líneas del remolque incorporan las variables de la potencia y dirección del remolcador, y en el sistema de simulación del IMT se utiliza un modelo integral que actúa sobre la totalidad de las superficies de cualquier buque y que afectan sus movimientos e hidrodinámica. Estos modelos responden en función a la superficie expuesta al viento, por lo que la respuesta de los modelos de barcos varía con el estado del mar, el viento, las corrientes y las fuerzas externas que se aplique sobre el barco simulado.
El sistema dispone de la estación del instructor que representa la interface para realizar la simulación. Desde este componente dl simulador de embarcaciones, se estableció el área modelar, la posición de los buques a simular, las características del clima marítimo incluyendo las corrientes marinas resultantes de la modelación hidrodinámica . El área de simulación y las profundidades existentes fueron tomadas de las cartas de navegación y desde la estación de instructor, el buque tanque y el remolcador fueron contralados de forma interactiva para mantener el rumbo de la proa orientado en la dirección del oleaje incidente, simulando así, la maniobra objeto del estudio.
Figura 4. Modelo de simulación para evaluar los movimientos de la embarcación.
RESULTADOS
Se obtuvieron condiciones de operatividad para un buque tanque de 228.6 m de eslora, 32.2 m de maga y un calado 16.5 m, ante diversos escenarios de clima marítimo. El estudio se realizó en el Laboratorio de Simulación de Embarcaciones en Tiempo Real del Instituto Mexicano del Transporte.
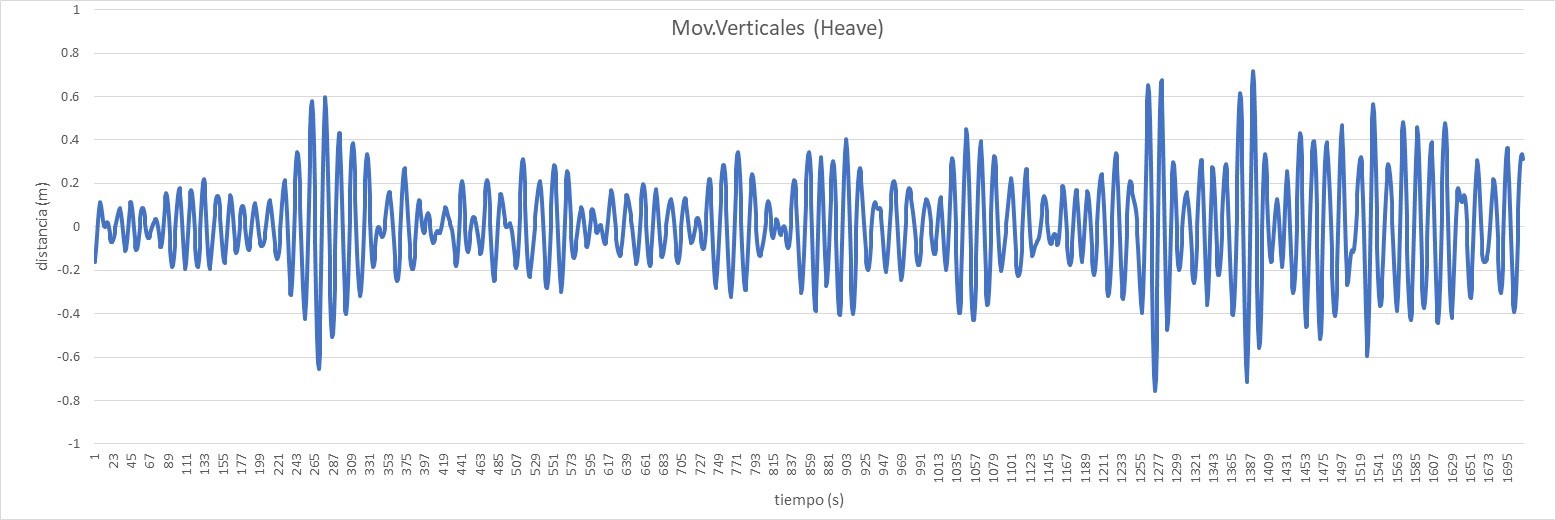
Las alturas de alturas de ola significante que se consideraron fueron desde los 0.5 m hasta los 3.0 m con sus correspondientes periodos de oleaje que tuvieron una variación en un rango desde los 5 segundos hasta los 23 segundos. Las corrientes marinas modeladas resultantes máximas del orden de 0.9 m/s. De las simulaciones realizadas se obtuvieron las gráficas de los movimientos del buque que se muestran a continuación.
Figura 5. Movimientos verticales
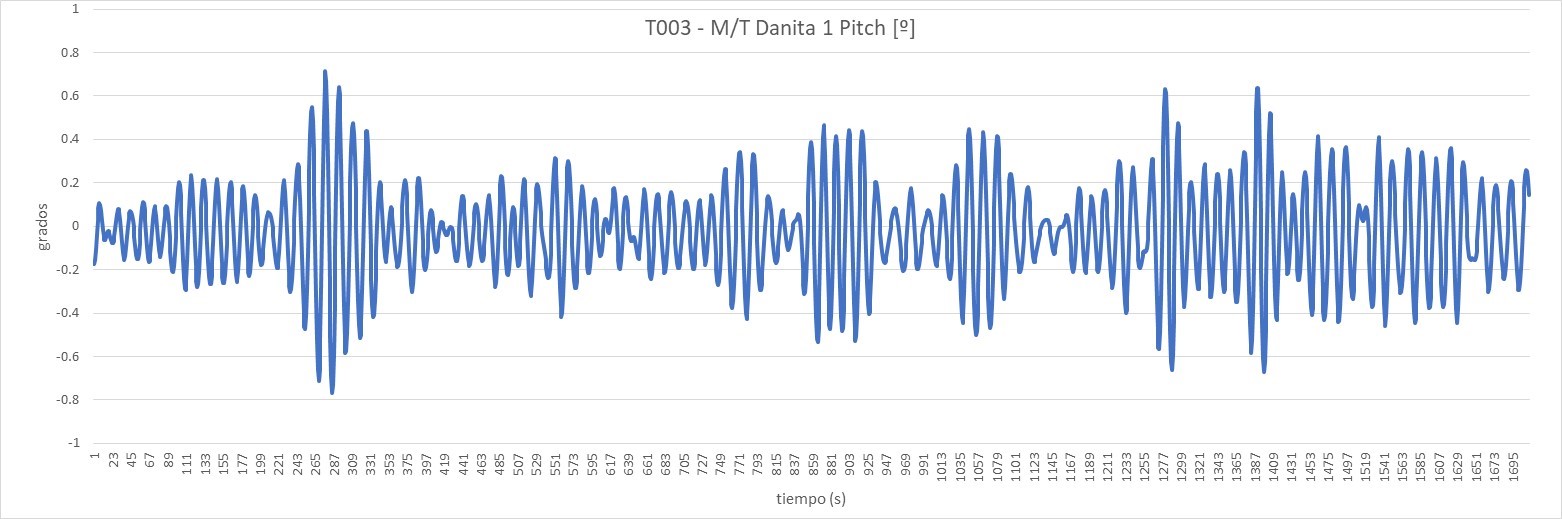
Figura 6. Rotación en el eje longitudinal del barco (cabeceo)
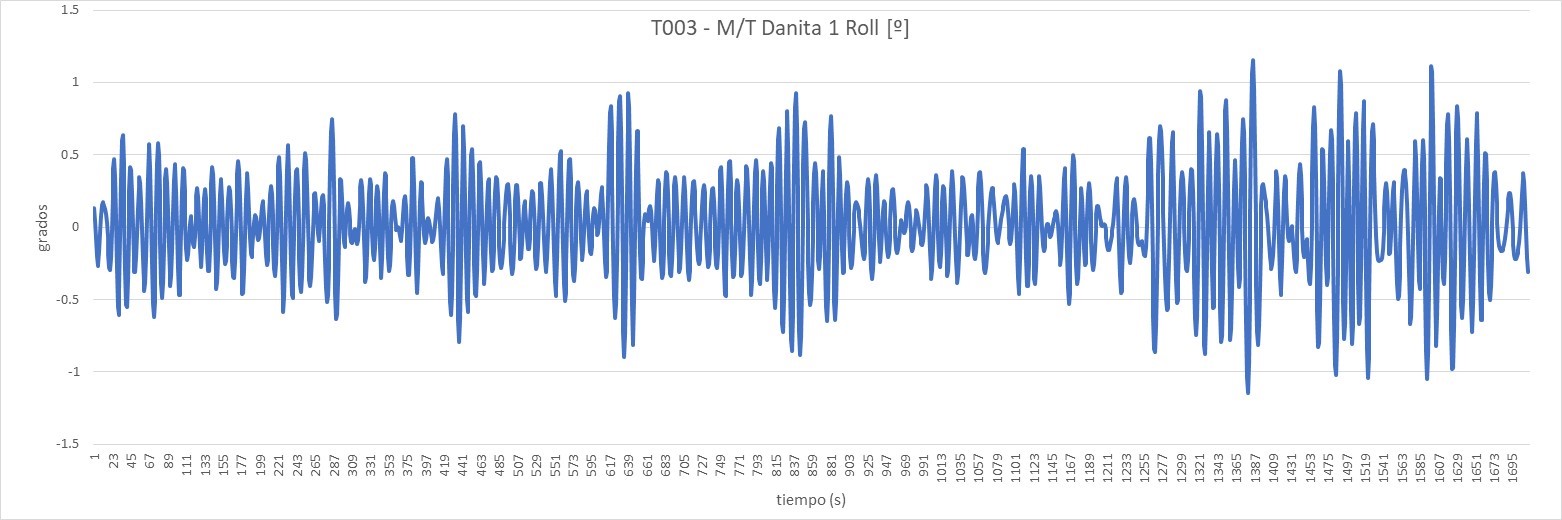
Figura 7. Rotación en el eje transversal del barco (balanceo)
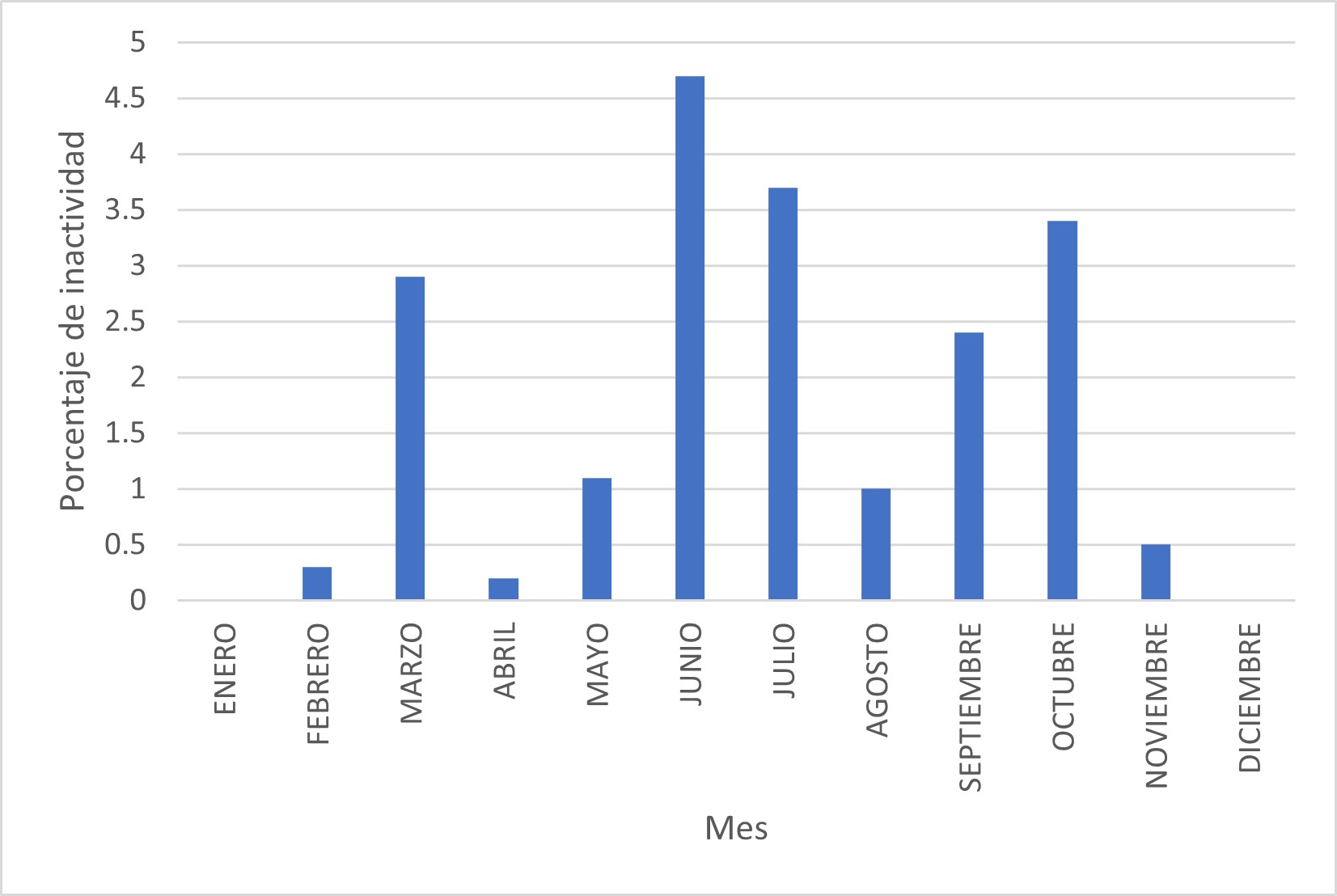
De las gráficas anteriores, y con base en el umbral definido por una altura de ola de 2.0 m la cual permite establecer las condiciones de operatividad admitida para la permanencia y descarga del buque que se estudió, se determinó el porcentaje de inactividad originado por los movimientos del buque que van más allá de los límites de operación de este tipo de embarcaciones obteniendo el promedio anual con un tiempo de inactividad de 1.68%. En la siguiente gráfica se presentan los resultados agrupados de forma mensual.
Figura 8. Porcentaje de inactividad por la acción del oleaje
ESTRADA Juan Ramón TOLEDANO Noé Fabricio RAMÍREZ Rodolfo MOLINA Francisco Javier “Las opiniones expresadas en esta publicación son de los autores (as) y no necesariamente reflejan los puntos de vista del Instituto Mexicano del Transporte” |